CatBusTest4
Jump to navigation
Jump to search
CatBus Test 4:
Breadboarded circuit and wrote Test Sketch (below)..
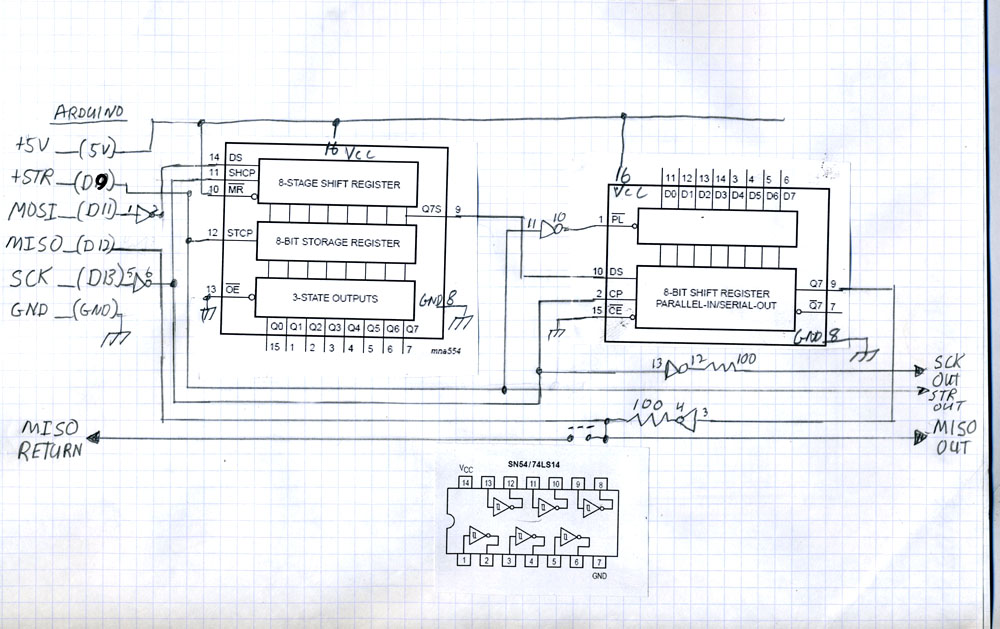
Test Sketch below (Cut&Paste):
Breadboarded circuit and wrote Test Sketch (below)..

Test Sketch below (Cut&Paste):
/* CatBus Test 4 Sends alternatine data, receives both data bytes Send 0x55, 0xAA which is displayed on 595 inverted Receive bits tied high or low on 165, seen inverted Init: SPI_CLOCK_DIV128 (125 Khz, 2uS data setup time Init: SPI_MODE2 See: http://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus terry@yourduino.com */ /*-----( Import needed libraries )-----*/ #include <SPI.h> /*-----( Declare Constants and Pin Numbers )-----*/ #define STROBE 9 // NOT controlled by SPI Library /*-----( Declare objects )-----*/ //None /*-----( Declare Variables )-----*/ byte dataByte1 = 0x55; byte dataByte2 = 0xAA; byte dataIn1 ; byte dataIn2 ; void setup() /****** SETUP: RUNS ONCE ******/ { Serial.begin(9600); SPI.setClockDivider(SPI_CLOCK_DIV128); SPI.setDataMode(SPI_MODE2); SPI.begin (); Serial.println("SPI CatBus Test"); pinMode(STROBE, OUTPUT); digitalWrite (STROBE, LOW); }//--(end setup )--- void loop() /****** LOOP: RUNS CONSTANTLY ******/ { Serial.println("S_T_A_R_T"); dataIn1 = SPI.transfer (0xff); //Read previous transfer Digital Input dataIn2 = SPI.transfer (dataByte1); //From last data to 595-Trash digitalWrite (STROBE, HIGH); digitalWrite (STROBE, LOW); // About 3 uS wide this way Serial.print("DataIn1 = "); Serial.println(dataIn1,BIN); Serial.print("DataIn2 = "); Serial.println(dataIn2,HEX); delay(4000); Serial.println("S_E_C_O_N_D"); dataIn1 = SPI.transfer (0xff);//Read previous transfer Digital Input dataIn2 = SPI.transfer (dataByte2); //From last data to 595-Trash digitalWrite (STROBE, HIGH); //Strobe 595 Outputs, Sample 165 Inputs digitalWrite (STROBE, LOW); // About 3 uS wide this way Serial.print("DataIn1 = "); Serial.println(dataIn1,BIN); Serial.print("DataIn2 = "); Serial.println(dataIn2,HEX); delay(4000); }//--(end main loop )--- /*-----( Declare User-written Functions )-----*/ //None //*********( THE END )***********
Output looks like this:
SPI CatBus Test
S_T_A_R_T
DataIn1 = 1110 (Trash)
DataIn2 = BF
S_E_C_O_N_D
DataIn1 = 1100011 (As Jumpers set)
DataIn2 = 55
S_T_A_R_T
DataIn1 = 11000011
DataIn2 = AA
S_E_C_O_N_D
DataIn1 = 11000011
DataIn2 = 55
S_T_A_R_T
DataIn1 = 11000011
DataIn2 = AA
S_E_C_O_N_D
DataIn1 = 11000011
DataIn2 = 55
zz