TEMP-PRESENTATION
MakerSpace Workshop Presentation / Resources

Content Outline:
- Arduino: Basics / What is it? What are MicroComputers?
- What can you do with Arduino? (LINK)
- The Arduino Software Installation:
- Arduino Architecture:
- Input Devices
- Output Devices
- Decision Making
HANDS-ON WORKSHOP:
Getting Started: Plug in the RoboRED

 Making things with Electronics and MicroComputers is different than Woodworking or Metalworking. There are a couple of little problems: Uh Oh!
Making things with Electronics and MicroComputers is different than Woodworking or Metalworking. There are a couple of little problems: Uh Oh!

Electricity is INVISIBLE !
AND, Software is INVISIBLE !
Not to worry! We will show you the ways to make these powerful tools Visible so you can use them.
Getting Started: Run "BLINK" (LINK)
- How to use the IDE
- Making changes / saving your version
- Errors / IDE highlighting
- Change the delay so that the LED blinks differently / Persistence of Vision
- Arduino Structure: I/O and Decision-Making concepts
THINKING about Arduino: (Need to update graphic ??)

Electrical Symbols (LINK)
[Sensor Inputs | Software Decisions | Action Outputs]

Now, we'll hook up some real input and output devices:
- Hands-On-Hardware:
- Breadboard (Details: LINK) (See Layout Photo: end of this page)


- Cables and Pins (Graphics plus hands-on)
- Pin Strips: Hold&Twist...

- Pin Strips: Hold&Twist...
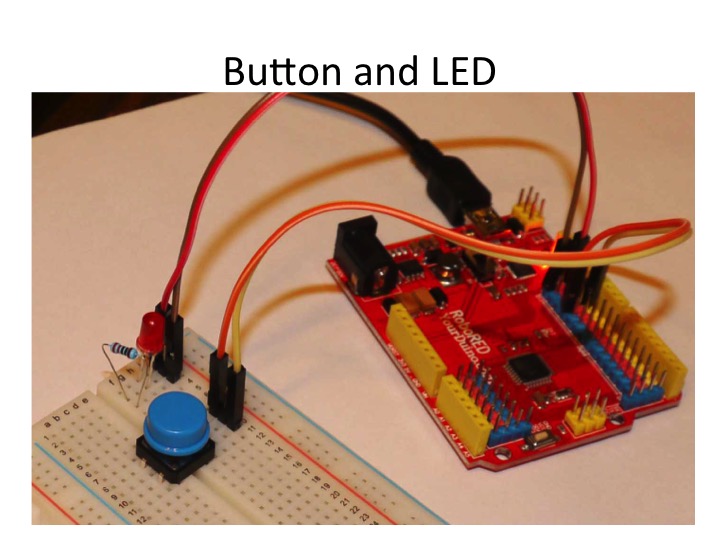
- Connect 2-wire cable to Breadboard, add LED and resistor



- Blink Variations
- Connect 2-wire cable to breadboard, add Pushbutton Switch
- Breadboard (Details: LINK) (See Layout Photo: end of this page)







Now, get a New IDE window. We will start writing our own Software Sketches:
BlinkSwitch
void setup() { // put your setup code here, to run once: pinMode(13,OUTPUT); pinMode(12,INPUT_PULLUP); } void loop() { // put your main code here, to run repeatedly: digitalWrite(13,digitalRead(12)); }
Input-DecisionMaking-Output
How to interact with Humans: The Serial Monitor
Optional: Serial Monitor Details and discussion (LINK)
HelloWorld
void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Hello World!"); } void loop() { // put your main code here, to run repeatedly: Serial.println("Now I'm inside the Loop!"); for (int count = 0; count < 1000; count++) { Serial.println(count); //delay(100); } delay(1000); }
Digital VS Analog: What's THAT all about??

Voltage Divider Concept
AnalogInPOT
void setup() { // put your setup code here, to run once: Serial.begin(115200); } void loop() { // put your main code here, to run repeatedly: Serial.println(analogRead(0)); delay(250); }

Sensing Hand Movement. Now: Sensing Light
- Voltage Dividers
- 10 K resistor(s)
- PhotoResistor
AnalogInOut2-LightSensor
void setup() { // put your setup code here, to run once: Serial.begin(115200); } void loop() { // put your main code here, to run repeatedly: Serial.println(analogRead(0)); if (analogRead(0) < 800) { Serial.println("It's Getting Dark!"); } analogWrite(11, analogRead(0) / 4); delay(250); }

Sensing Temperature: The Thermistor
AnalogInOut3-TemperatureSensor
void setup() { // put your setup code here, to run once: Serial.begin(115200); } void loop() { // put your main code here, to run repeatedly: Serial.println(analogRead(0)); if (analogRead(0) > 550) { Serial.println("It's Getting HOT!"); } analogWrite(11, analogRead(0) / 4); delay(250); }
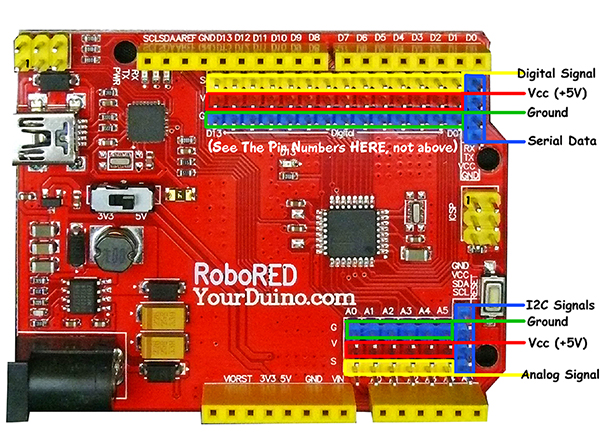
A look at Arduino Architecture again:
SIGNAL Inputs and Outputs:
- Digital SIGNALS to/from devices
- Pulse concepts
Its' Complicated Code. Use Libraries others have written.
The ServoMotor: (Signal Output)
- Load File>Examples>Servo>Sweep
- What's the #define ??
- Libraries usually have "Examples"
- NOTE: Some Laptops do not have enough 5V power to run Servo.
- Can upload sketch, then switch to battery or WallWart power
The Ultrasonic Sensor: (Signal Input)
- A complex device
- Understanding the Ultrasonic Distance Sensor and it's Science:(LINK)
- Connect 4 pins: Vcc, Gnd, 7, 6
- Plug in Ultrasonic Sensor
Sketch for Ultrasonic Sensor:
/* YourDuino SKETCH UltraSonic Serial 2.1 Runs HC-04 and SRF-06 and other Ultrasonic Modules Modified to use pins 7 and 6: MakerSpaceWorkshops Open Serial Monitor to see results Reference: http://playground.arduino.cc/Code/NewPing Questions? terry@yourduino.com */ /*-----( Import needed libraries )-----*/ #include <NewPing.h> /*-----( Declare Constants and Pin Numbers )-----*/ #define TRIGGER_PIN 7 #define ECHO_PIN 6 #define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). //Maximum sensor distance is rated at 400-500cm. /*-----( Declare objects )-----*/ NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. /*-----( Declare Variables )-----*/ int DistanceIn; int DistanceCm; void setup() /****** SETUP: RUNS ONCE ******/ { Serial.begin(9600); Serial.println("UltraSonic Distance Measurement"); Serial.println("YourDuino.com terry@yourduino.com"); }//--(end setup )--- void loop() /****** LOOP: RUNS CONSTANTLY ******/ { delay(100);// Wait 100ms between pings (about 10 pings/sec). 29ms should be the shortest delay between pings. DistanceIn = sonar.ping_in(); Serial.print("Ping: "); Serial.print(DistanceIn); // Convert ping time to distance and print result // (0 = outside set distance range, no ping echo) Serial.print(" in "); delay(100);// Wait 100ms between pings (about 10 pings/sec). 29ms should be the shortest delay between pings. DistanceCm = sonar.ping_cm(); Serial.print("Ping: "); Serial.print(DistanceCm); Serial.println(" cm"); }//--(end main loop )--- /*-----( Declare User-written Functions )-----*/ // None //*********( THE END )***********
More information about Ultrasonic Sensors:
How does the Ultrasonic Sensor Work?
The DS18B20 Temperature Sensor (To be added)
Breadboard Layout
